Tak Zenit je hotový. Keďze ale nemám PMD tak musím spraviť program pre Commodore alebo pre Arduino.
 Pre záujemcov ešte pár fotiek realizácie.
Pre záujemcov ešte pár fotiek realizácie.
Najprv klepeto. Mechanizmus pozostáva z medeného drôtu Pri spájkovaného k brzdnému lanku. Spoj je zakrytí zmrštovacou bužírkou.
 Tiahla sú realizované 2mm zváracím drôtom. Dá sa dosť dobre ohýbať a stále je dosť pevný.
Tiahla sú realizované 2mm zváracím drôtom. Dá sa dosť dobre ohýbať a stále je dosť pevný.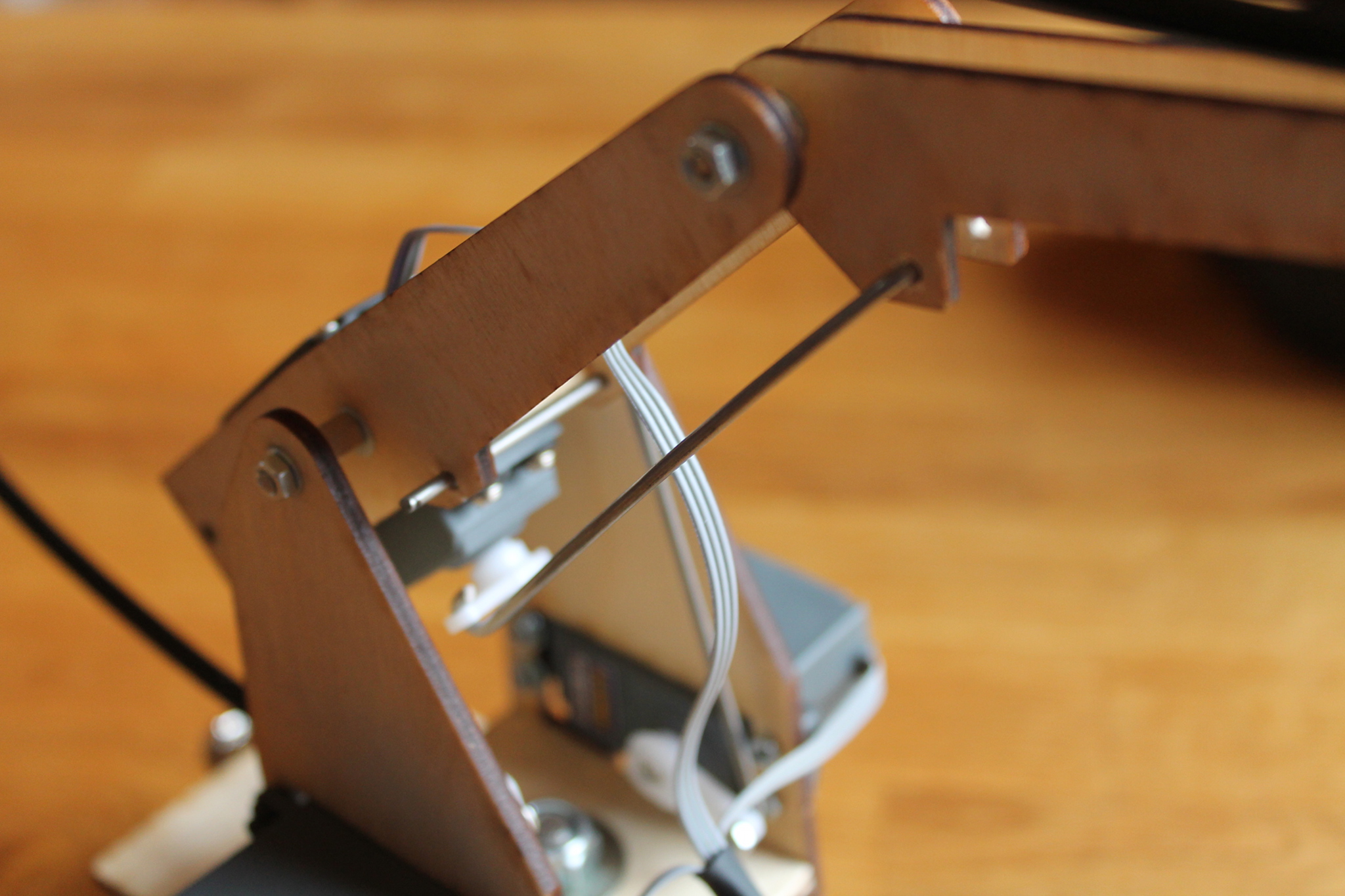 Motory sú dodávané z krátkymi vodičmi tak som ich vymenil. Nemusel som záhať predĺženia alebo konektory.
Motory sú dodávané z krátkymi vodičmi tak som ich vymenil. Nemusel som záhať predĺženia alebo konektory.
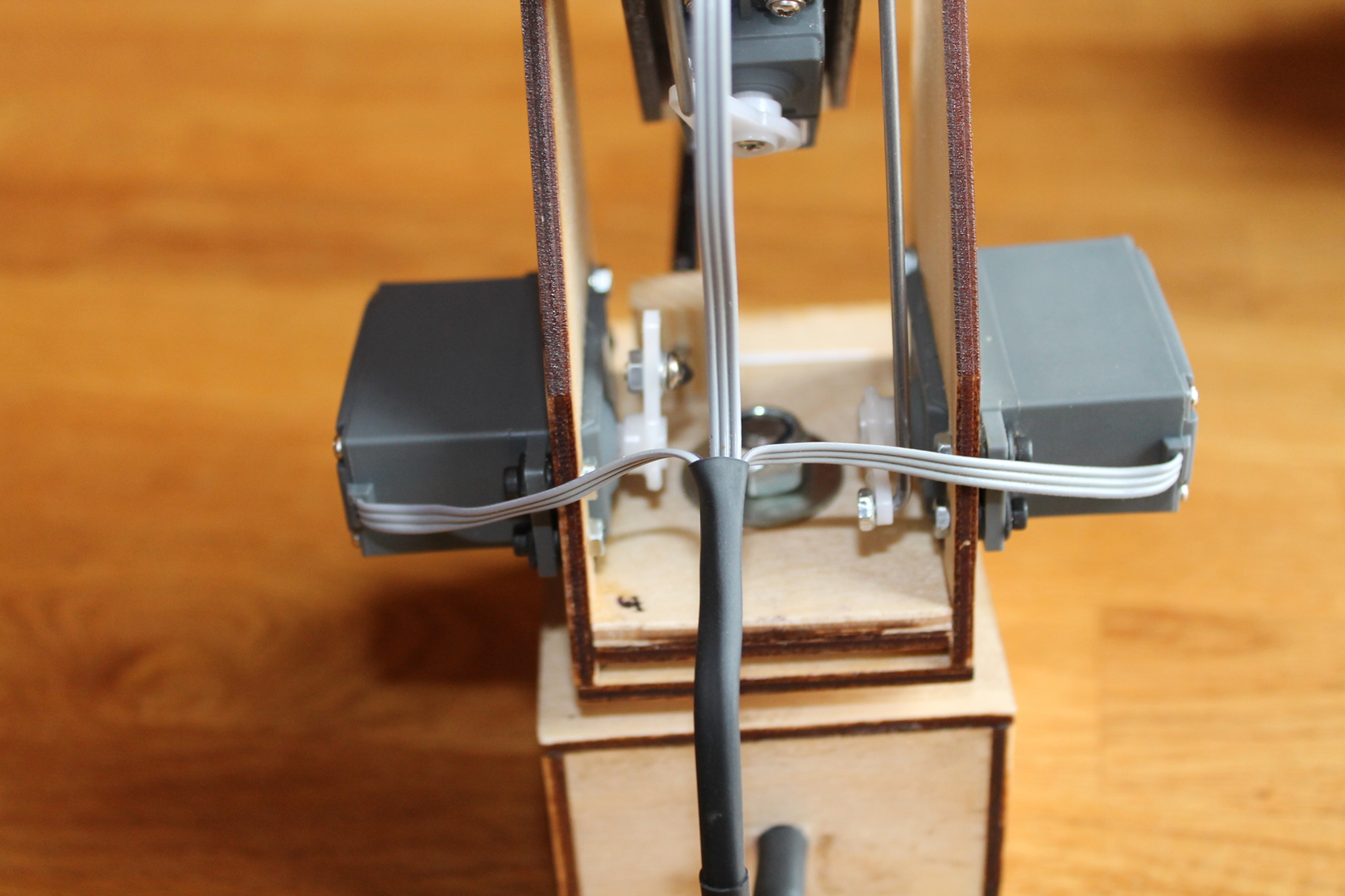 Jedna z mála rozdielov od originálu je upevnenie uchytenia bowdenu. Pôvodne je to riešene hranolčekom medzi stenami
Jedna z mála rozdielov od originálu je upevnenie uchytenia bowdenu. Pôvodne je to riešene hranolčekom medzi stenami
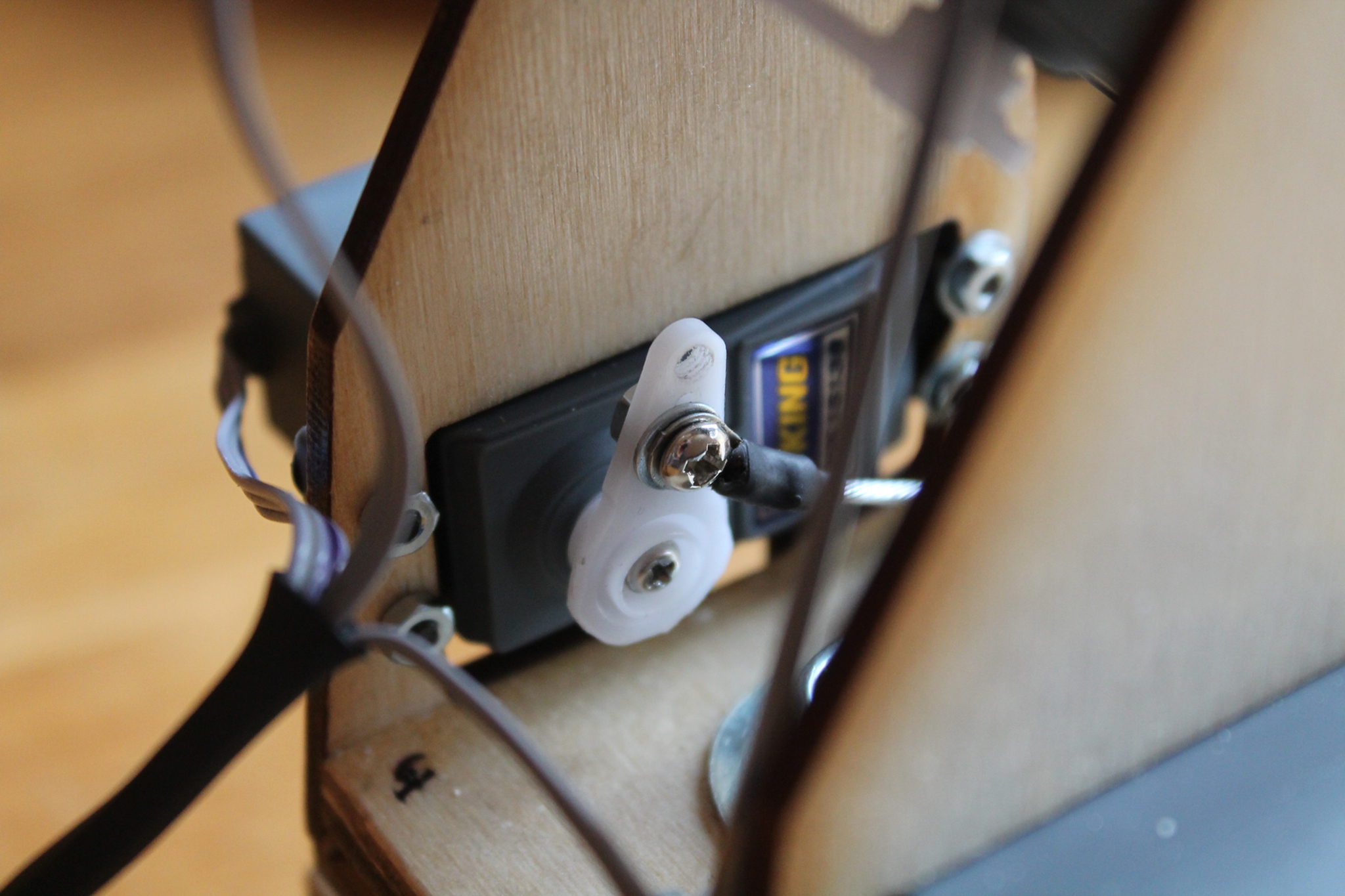
 Ukončenie tiahla a lanka.
Ukončenie tiahla a lanka.

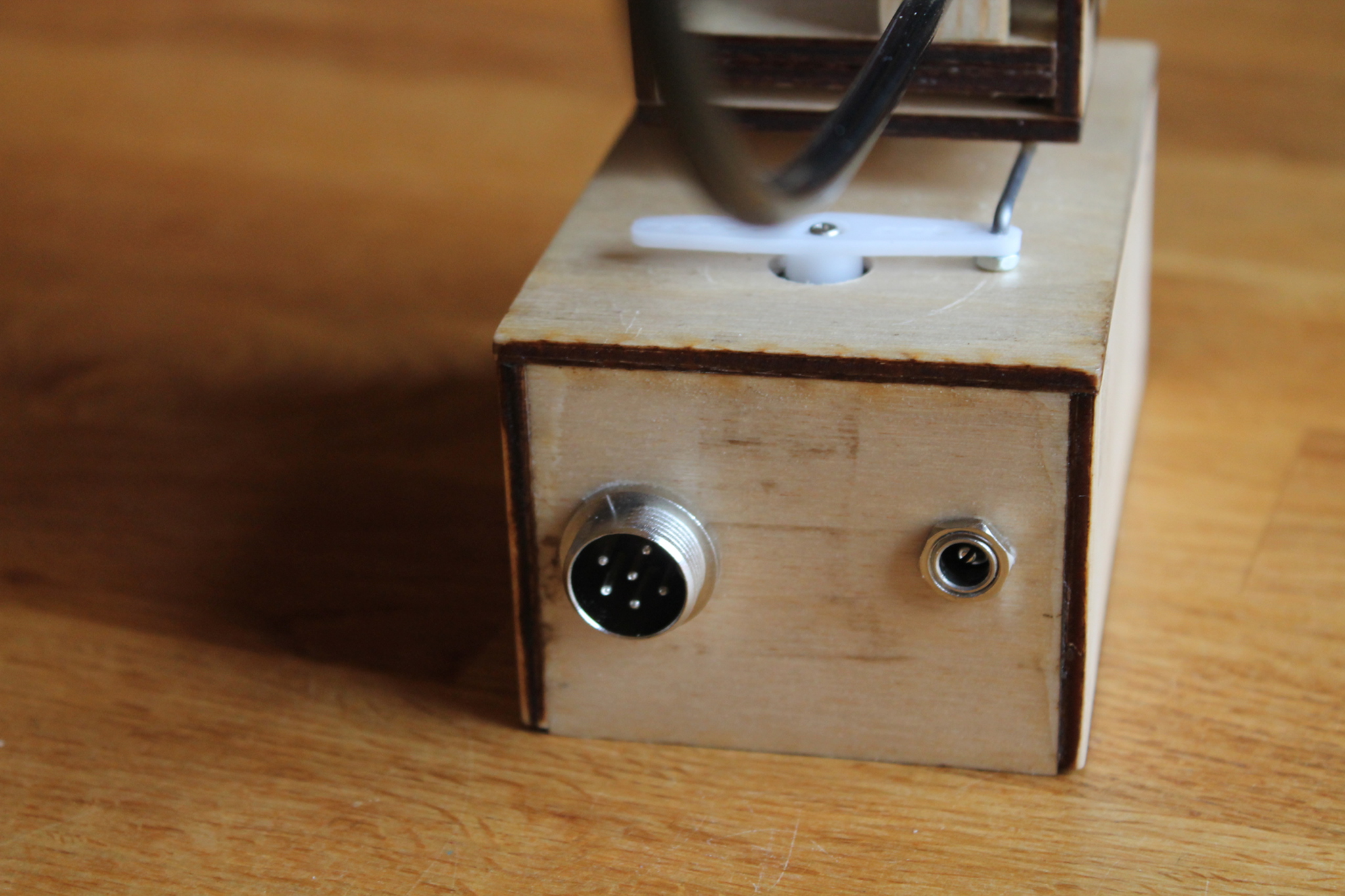
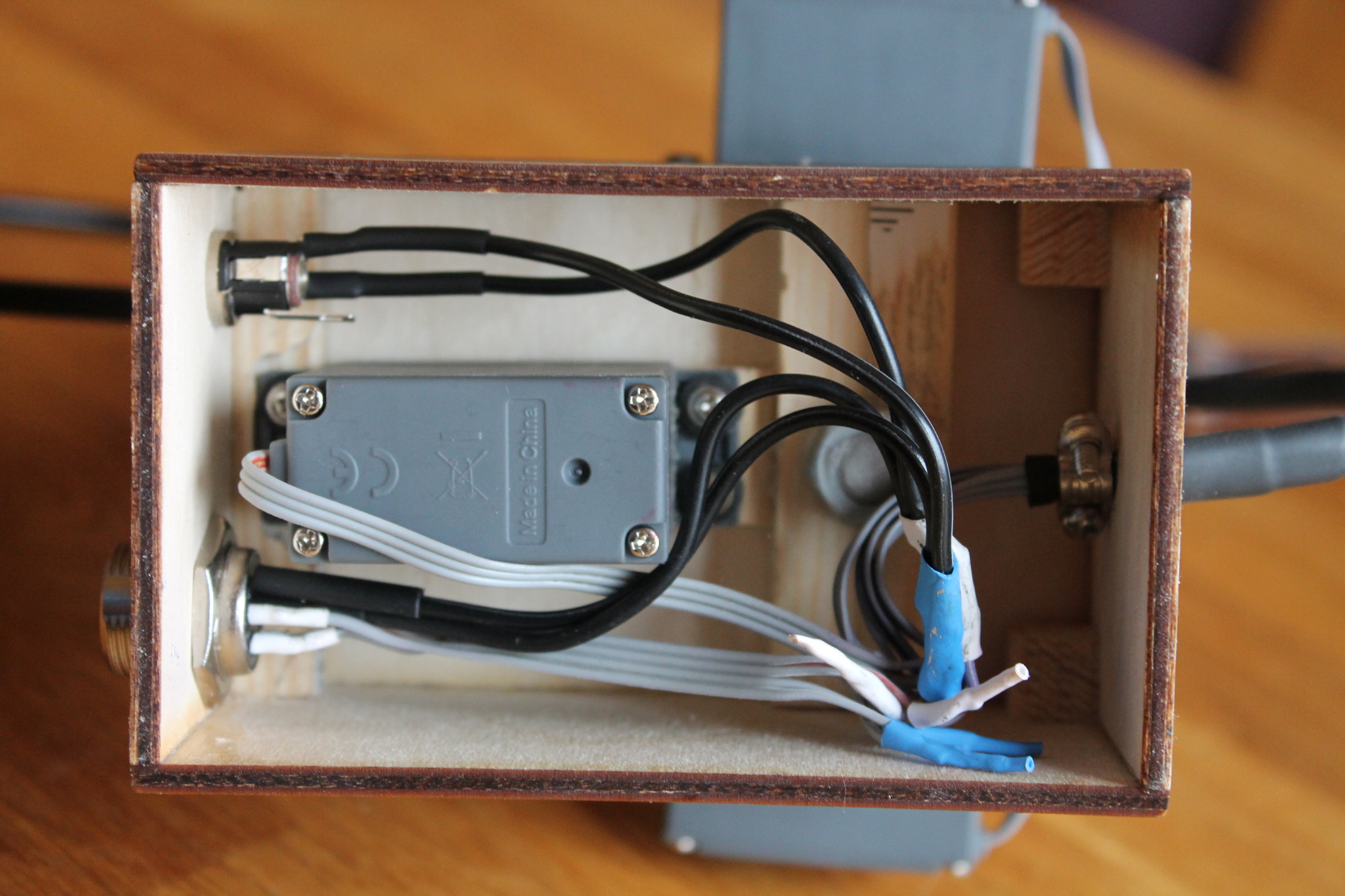
 Do podstavy som umiestnil konektory napájania a ovládania. Napájať robota je možné aj cez riadiaci konektor prípadne napájať z robota riadenie.
Do podstavy som umiestnil konektory napájania a ovládania. Napájať robota je možné aj cez riadiaci konektor prípadne napájať z robota riadenie.
 Teraz sa už len vrhnúť na SW. 🙁 To vždy býva problém.
Teraz sa už len vrhnúť na SW. 🙁 To vždy býva problém.
Nakoniec ešte trapné video:
