V návode tohto robota chýbajú rozmery niektorých súčiastok. Medzi také patria aj osky. Včetne ich realizácie. Osobne som sa rozhodol pre nasledovné riešenie.
Kop prvé som si určil vnútornú šírku jednotlivých ramien. Dolné rameno nemá súčiastku ktorá by definovala jeho ďalšie rozmery. V prípade vrchného ramena nám súčiastka 9 definuje medzeru medzi časťami ramena na 7mm, Co je náhodou aj rozmer jedného zo štandardných M3 stĺpikov. Stĺpik som prevŕtal 3.2 vrtákom čím som získal súčiastku č. 14. Ktorú som, sekundovým lepidlom, vlepil na miesto.
 Stredné rameno ale nemá žiadnu súčiastku ktorá by definovala medzeru. Jediná podmienka je aby sa tam vmestilo servo. To má na šírku 4cm. Aby som mal rezervu a mohol použiť štandardný rozmer stĺpiku rozhodol som sa pre 25mm. Stĺpik som tiež prevŕtal. Získal súčiastku 15.
Stredné rameno ale nemá žiadnu súčiastku ktorá by definovala medzeru. Jediná podmienka je aby sa tam vmestilo servo. To má na šírku 4cm. Aby som mal rezervu a mohol použiť štandardný rozmer stĺpiku rozhodol som sa pre 25mm. Stĺpik som tiež prevŕtal. Získal súčiastku 15.
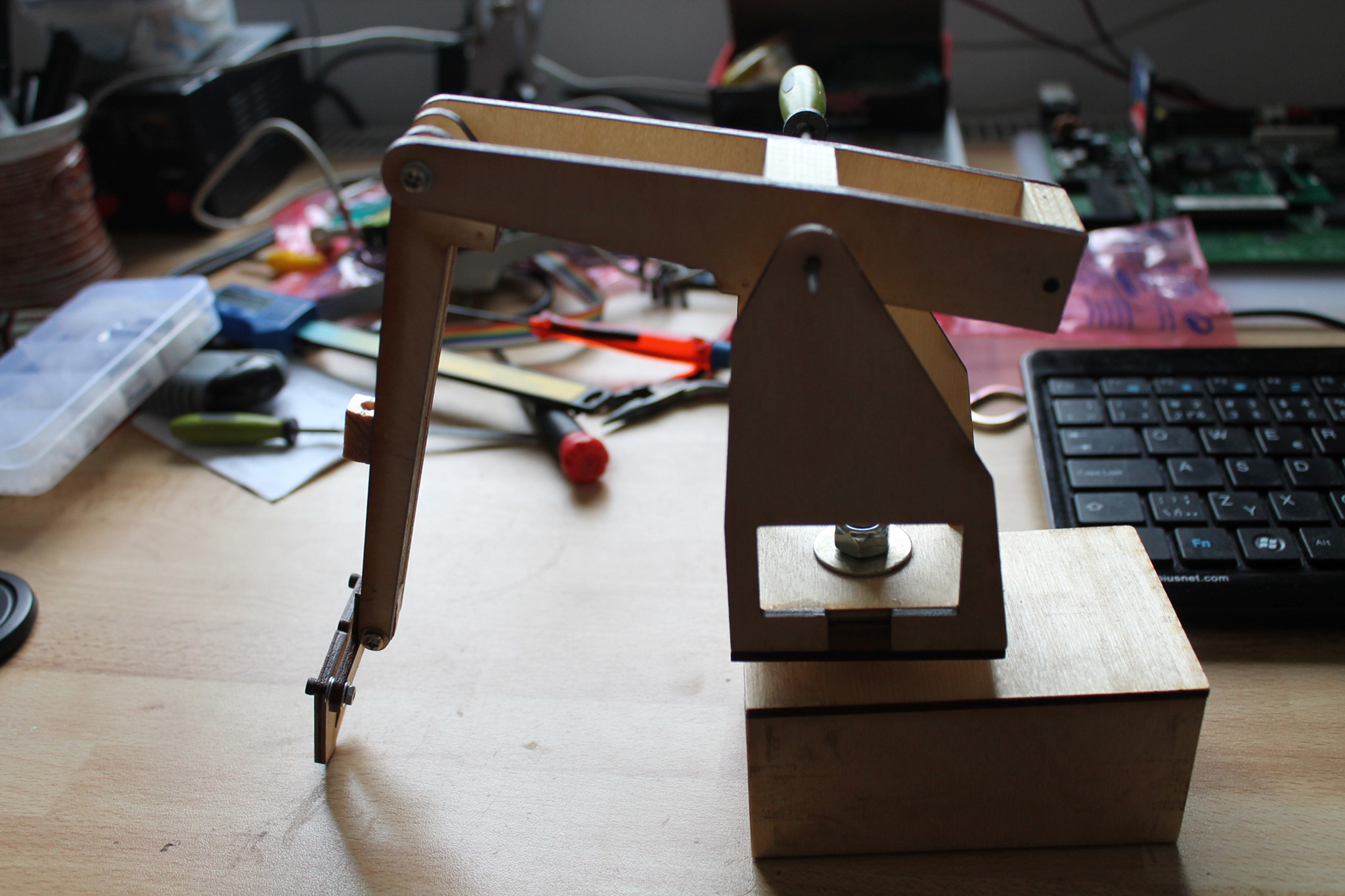
Ako osky som použil dlhé M3 skrutky. medzeru medzi súčiastkami som vyplnil M3 stĺpikmi. V prípade osky na hornom ramene sú to 5mm vysoké stĺpiky v prípade osky dolného ramena 7mm stĺpiky. Na ramenách sú pri oskách ešte použité podložky slúžiace na zamedzenie opotrebovania preglejky. Toto riešenie sa dosť zle skladá ale dáva možnosť nastavenia vôle na oskách.
Obdobne som nakoniec vyriešil aj otočnú os na podstavci. Jedná sa o 50mm kus zo závitovej tyče. Ak by to bola skrutka mala by mať 45mm. Závitovú tyč som zaskrutkoval do závitu vyrezaného v podstavci a zabezpečil skrutkami ktoré som proti povoleniu zabezpečil sekundovým lepidlom.
Čiastočne zostavený robot. chyba mi dlha M3 skrutka takže namiesto osky tam je pilník.