Robot Zenit. Hotovo???????
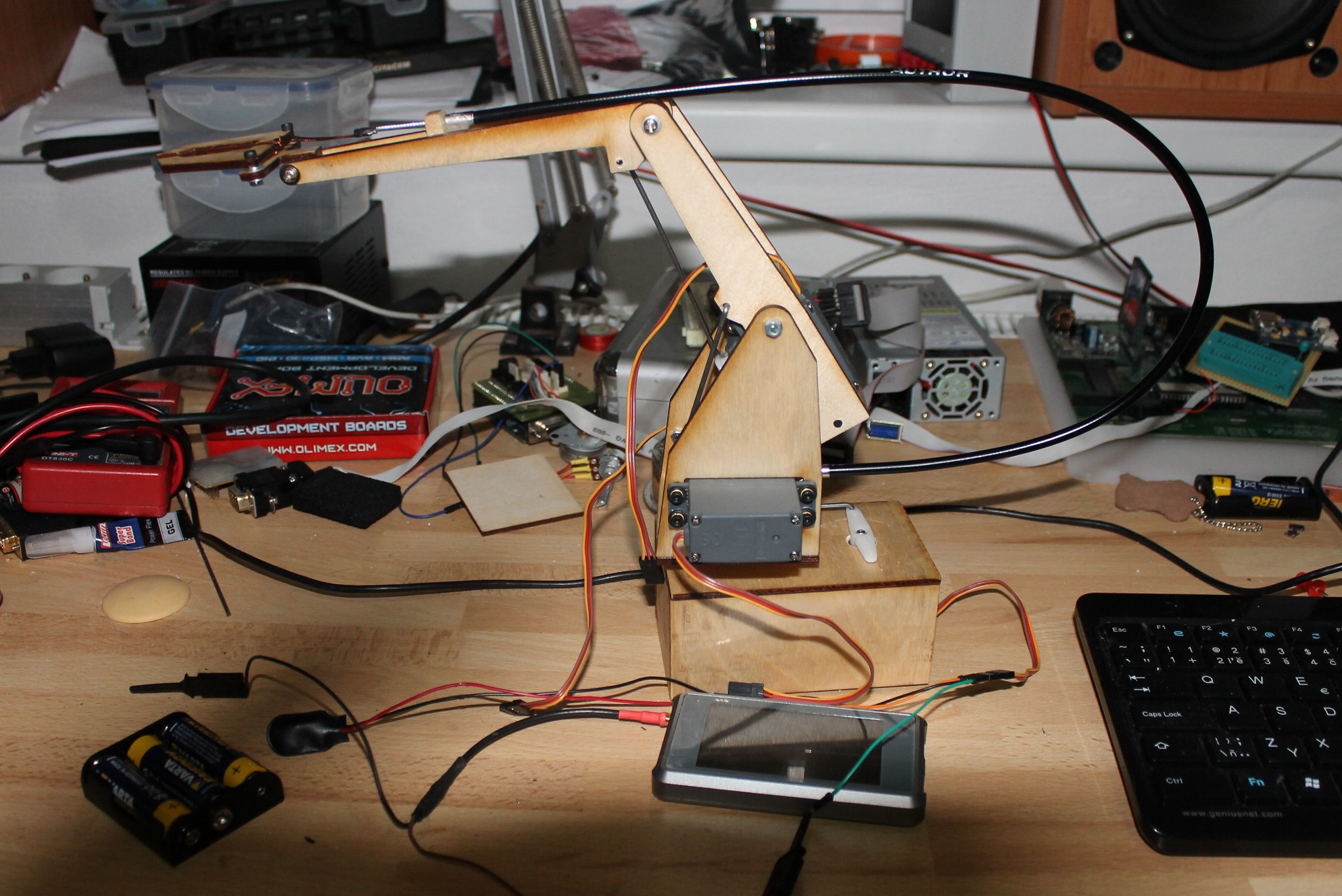
Tak včera večer som konečne skončil zo stavbou Zenita. Ale musím doriešiť kábliky. Tie ktoré trčia z servomotorov sú krátke. Takže aj keď je robot hotový nieje to koniec práce. Rozmýšľam do podstavca umiestniť konektor v ktorom budú privedené všetky servomotory. Na fotke tiež vidno DS203 ktorý som použil ako servotester.
UnoProLogic a VHDL
Keďže UnoProLogic je americký výrobok sú všetky ukážky písané vo verilogu. Keďže sme ale v Európe kde je väčšinovo používané VHDL pripravil som template pre tento HW vo VHDL.
Nakoniec ešte pár pripomienok k HW.
- Spôsob prispôsobenia na 5V logiku je nešťastní. Riešenie z SN74LVC4245A dosť obmedzuje využitie.
- Porty CPLD sú cez buffre pripojené aj GND a Aref. čo môže spôsobovať problémy.
- Niektoré verzie Arduina majú SDA a SCL spojené z A4 a A5, iné z D2 a D3 z čim treba počítať keďže Sú pripojené cez iné buffre.
Alternatívy: AmaniGTX Ale to je nepoužiteľné pre 5V Arduina. Aj keď výrobca tvrdí opak. MAX-II potrebuje oddeľovacie odpory aby bol 5V tolerantný.
Arduino a Altera CPLD
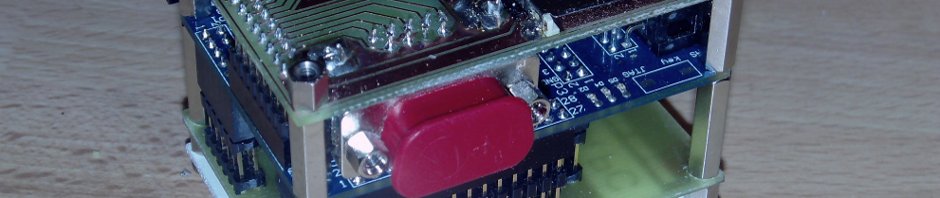
Keďže Altera v novšom Quartus-II nepodporuje MAX3000 a MAX7000. Som rozmýšľal nad nejakým devel kitom z MAX-II alebo MAX-V. Pri prehľadávaní Ebay-u som narazil na UnoProLogic. Jedná sa o shield pre arduino osadený EPM570. Je možné ho použivať samostatne alebo spolu z arduinom. Na to aby bolo možné CPLD programovať bol ku shieldu doplnený ešte FT2232H Mini Module. Tento je možné používať ako sériový port, JTAG, SPI, …… Vcelku zaujímavé je že ma celá „sranda“ ma vyšla menej ako stojí FT2232H Mini Module. A bez poštovného menej ako vlastné CPLD u farnellu.
GlusterFS a OpenNebula problém (rozuzlenie)
Nakoniec som zistil zaujímavé správanie. Moja inštalácia GlusterFS ma problémy v konfigurácii Striping + Miroring. Bol problém pri kopírovaní, Ale pokiaľ súbor už existoval ,vytvorený pomocou touch alebo predchádzajúcim cp, tak nasledujúce kopírovanie prejde. Po pre konfigurovaní na striping mod problémy zmizli.
GlusterFS a OpenNebula problém.
Zas som sa vrátil k jednému z problémov ktoré mám z GlusterFS a OpenNebulou. Nejde vytváranie virtuálnych serverou na glusterfs datastore. OpenNebule sa to nedari nikdy. Vždy som to potom skúšal spustením clone skriptu ale to vždy prešlo.Tentoraz som to ale skúsil bez predošlého testu v OpenNebule a výsledok je takýto:.
J1 CPU vo VHDL.
Ďalší záchvat prokrastinace. A napriek tomu aby som pracoval na dokončení VHDL verzie C_brainu, z dôvodu jednoduchšieho vývoja bez ROM emulátoru. Som sa flákal na nete a narazil na J1 CPU. Jedná sa o Forth CPU. To znamená že nemá žiadne registre ale len zásobníky.
BT100 a C64
Ak máte to „šťastie“ a vlastníte BT100. Tak som narazil na nejaké informácie ako použiť tento „HW ziav“.
Compukit UK101 vo FPGA_PC „Dokončenie“
Celý víkend som nerobil čo som mal na pláne ale hral sa z Grantovým UK101. Vyrobil som obrazy pre tri konfigurácie všetky nájdete na stránke projektu Fpga_PC. Všetky úpravy sú Grantove. Len pri pripojení externej RAM som nedodržal názvy vývodov pre RAM a použil svoje ktoré používam z ZX81.
Compukit UK101 vo FPGA_PC
Tak a už je to. Úvodná verzia UK101 krásne fungovala. Nakoniec som zistil že moj problém z klávesnicou bol v programe. Pokiaľ som stlačil ako prvú inú klávesu ako c/w/m počítač prestal reagovať a pomohol až reset. Staršia monitor ROM=ka tento problém nemala.