Robil som si malý prieskum ohľadne rozširujúcich konektorov na dev kitoch.
Keby to niekoho zaujímalo malé porovnanie.
Archív kategorií: HW a SW
Grant Searle sa snažil.
Grant Searle zapracoval na svojom projekte MULTICOMP. Okrem klasik z MS Basicom spravil aj CP/M. V kratkom čase sa pokusim upraviť jeho kod pre FPGA-PC
Ako som si zaoptimalozoval.
Na jednom projekte som sa dostal na obmedzenia veľkosti flash v ATtiny2313. Tak som sa vrhol na optimalizáciu (Kód sa kompiloval z prepínačom -Os). V kóde som našiel len jednu možnosť ako optimalizovať veľkosť. Zbaviť sa násobenia a delenia. Vo výsledku sa mi celkový kód scvrkol o 98 bytov oproti pôvodnej veľkosti.
BT100 tlačí!!!!
Tak konečne som zohnal kopirák a aj volný čas.
BT100 a linux
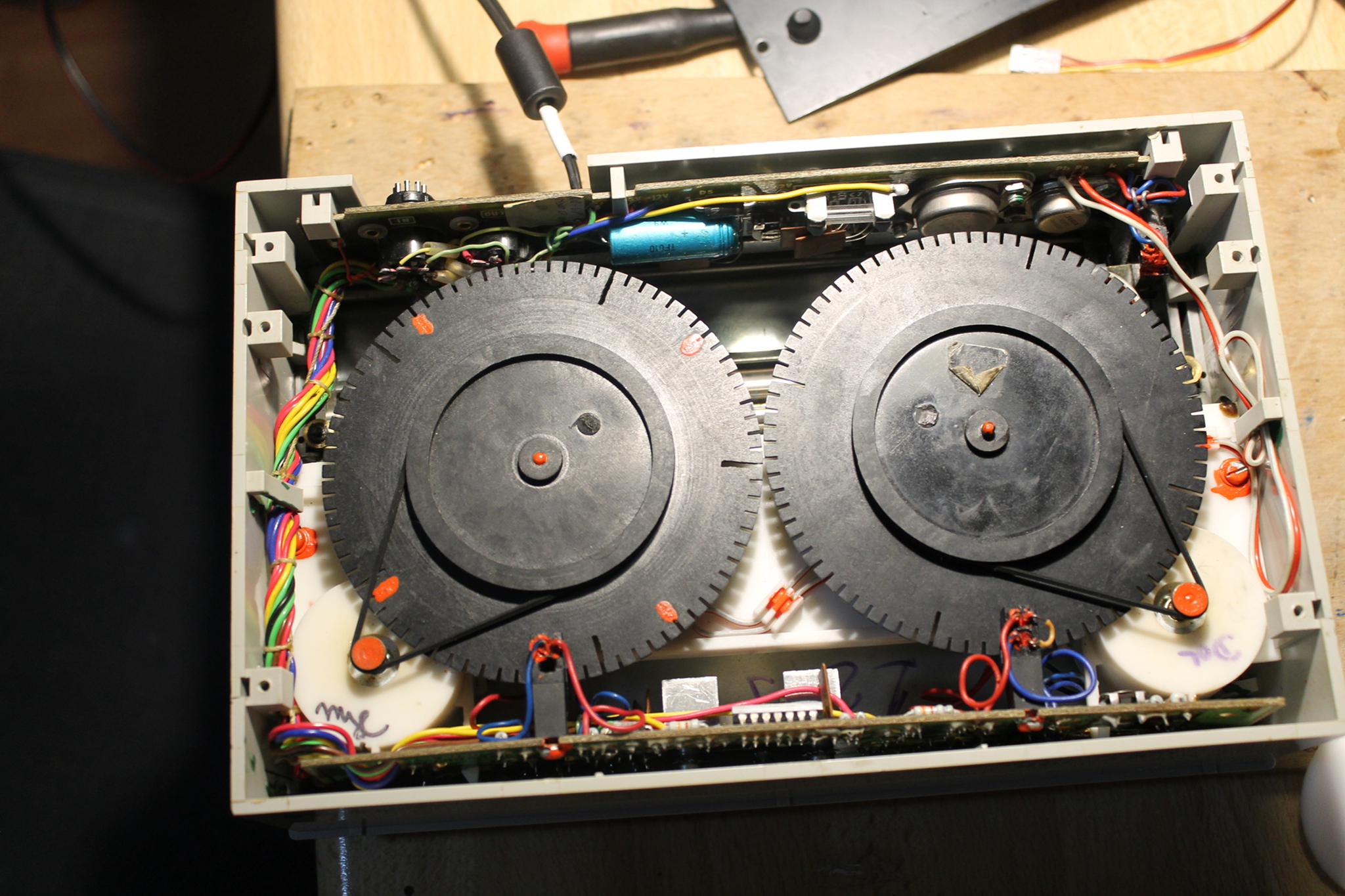
BT100 pripravená
Tak dobrá vec sa podarila. BT100 je zložená ručne otestovaná. Len by som rád vedel prečo niekto znížil šírku kroku posuvu papiera. Vid obrázok:
Oprava BT100
Dostal som sa výhodne k BT-100. Bohužiaľ sa na nej už niekto podpísal. Tá moja má ale jeden hlavný problém. A to odpálený MBA810DS. A súdiac podla stavu dosky nie prvý krát. Našťastie môj lokálny predajca súčiastok nič nevyhadzuje a skladuje 1ks aj niekoľko rokou. Tak som mu od toho posledného kusu pomohol. Pre nešťastníkov ktorý by mali rovnaký problém. Ešte spomeniem možné náhrady: TBA810 (originál) a UL1481.
Dúfam že dnes budem môcť konečne tlačiť.
p.s. Zahrávam sa z myšlienkou nahradiť elektroniku jedným H-bridge L293NE, L293D, TIL293D či SN754410. Na funkčnosti sa to neprejaví. Problém je ale z nastavením rýchlosti. Motorky ako také totiž nejdú na 12V ale približne na 5V. Takže napätie pre nich by bolo nutné nastaviť nejakým variabilným stabilizátorom.
Robot Zenit. Hotovo.
Tak Zenit je hotový. Keďze ale nemám PMD tak musím spraviť program pre Commodore alebo pre Arduino.
 Pre záujemcov ešte pár fotiek realizácie.
Pre záujemcov ešte pár fotiek realizácie.
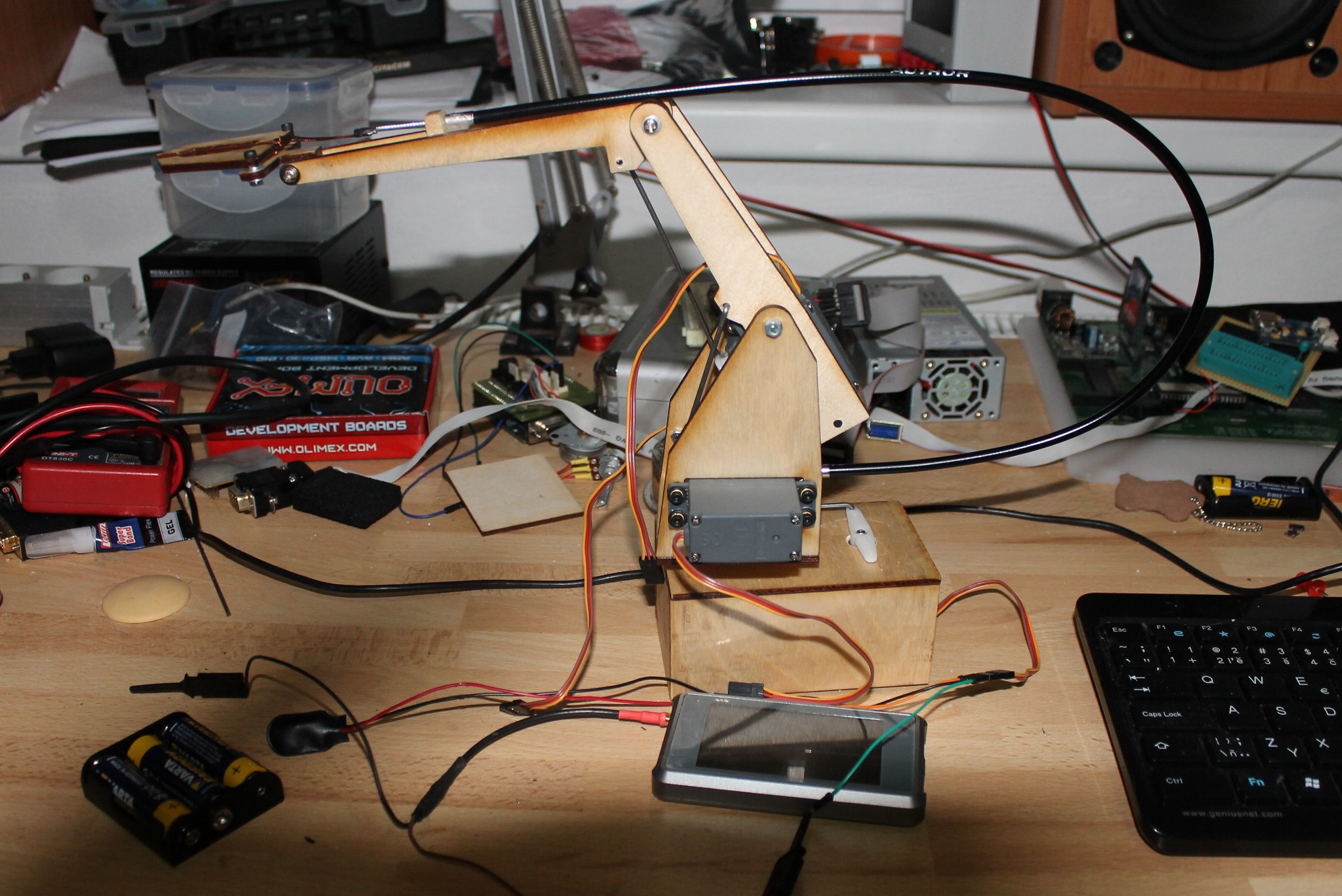
Robotické ruky a Commodore64
Robot Zenit. Hotovo???????
Tak včera večer som konečne skončil zo stavbou Zenita. Ale musím doriešiť kábliky. Tie ktoré trčia z servomotorov sú krátke. Takže aj keď je robot hotový nieje to koniec práce. Rozmýšľam do podstavca umiestniť konektor v ktorom budú privedené všetky servomotory. Na fotke tiež vidno DS203 ktorý som použil ako servotester.