Z priestorových a ergonomických dôvodov som hľadal spôsob ako písať programy v Basicu pre Commodore64 na PC a generovať z nich .PRG súbor.
Výsledkom hľadania bol program bastext. Zdrojové kódy ale nie sú kompilovateľné z novšími GCC tak dávam k dobru moju upravenú verziu, Úpravy sú čisto kozmetického rázu a odstraňujú varovania a chyby ktoré bránili kompilácii.
P.S. Program prekladá BASIC program až po nájdení označení začiatku: „start tok64 meno_výstupného_súboru“. Po značku konca: „stop tok64„.
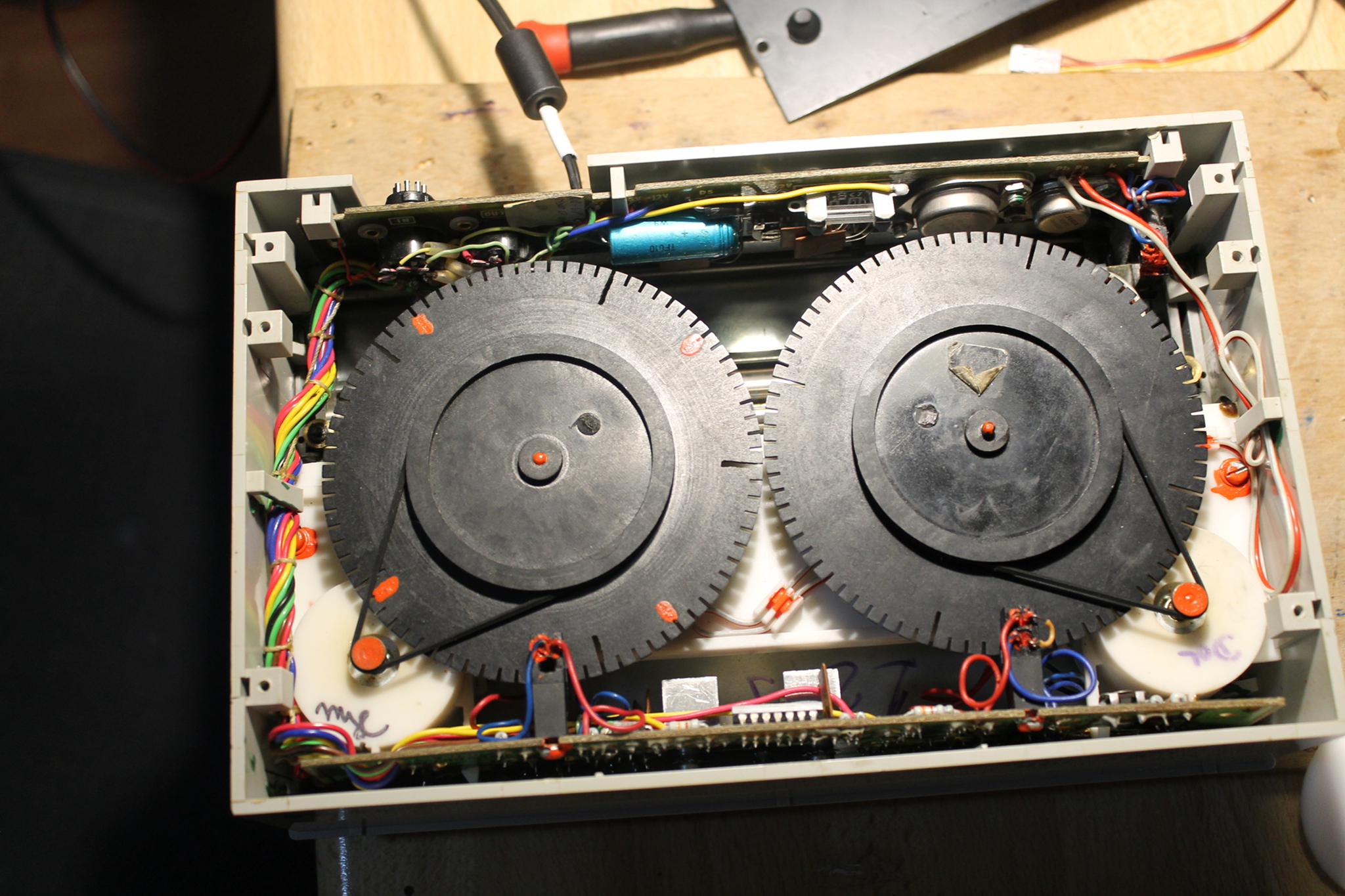
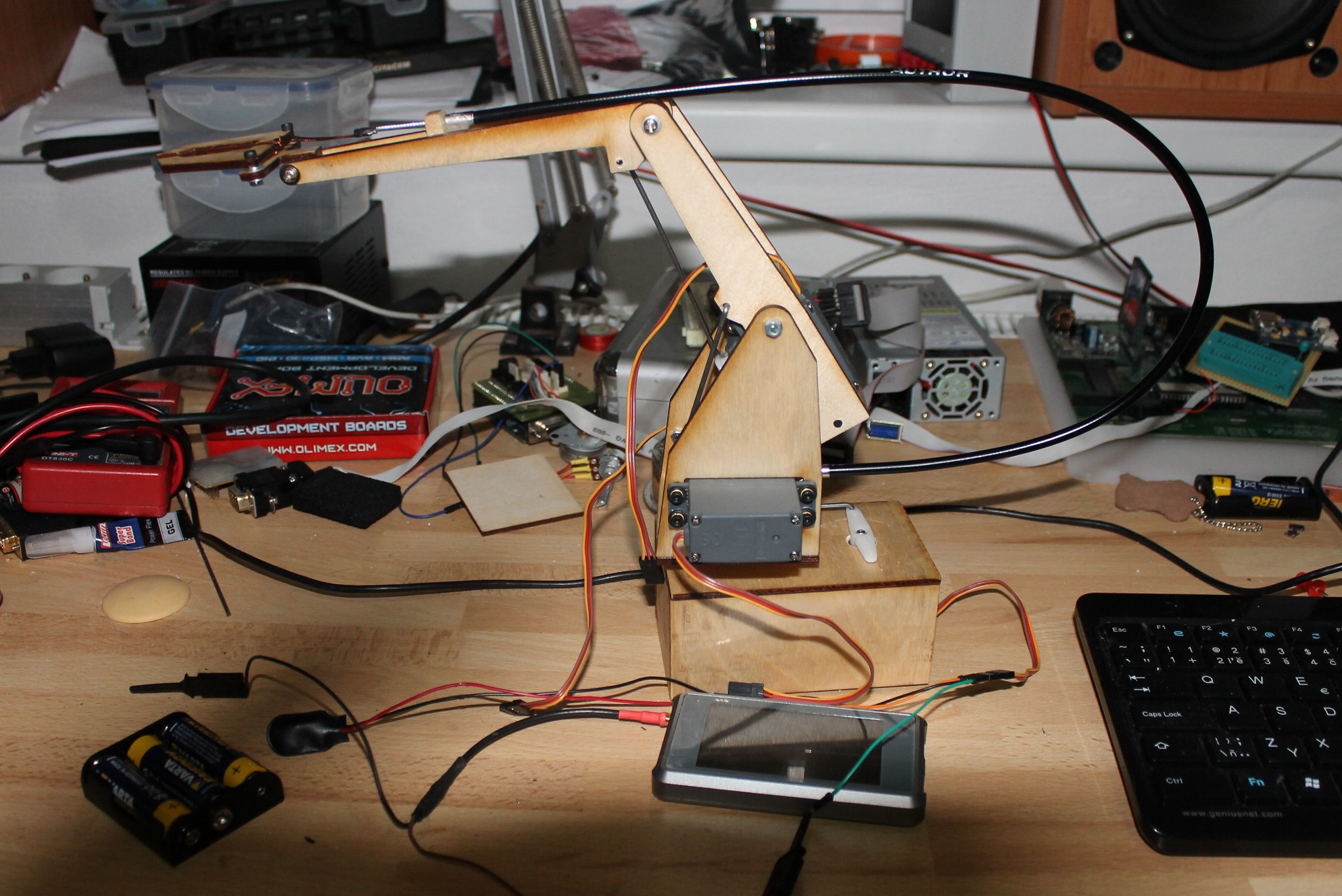
 Pre záujemcov ešte pár fotiek realizácie.
Pre záujemcov ešte pár fotiek realizácie.